🧑🏼🔧 Project นี้ อยู่ในรายวิชา Embedded Lab ⚡
🎯 Purpose
โครงการนี้มีจุดประสงค์เพื่ออธิบายและแสดงที่มาของสูตรในการหาคาบการแกว่งของลูกตุ้ม (Pendulum) โดยสามารถใช้เป็นสื่อการเรียนการสอนในหัวข้อการเคลื่อนที่แบบการแกว่งของลูกตุ้มได้ อีกทั้งยังพิสูจน์ความถูกต้องของการทดลองโดยใช้ค่าความเร่งเนื่องจากแรงโน้มถ่วง (g) เพื่อยืนยันผลลัพธ์ที่ได้ว่ามีความแม่นยำ 🌍.
🛠 System Overview
1️⃣ ระบบนี้เริ่มต้นด้วยการยึดลูกตุ้มด้วย แม่เหล็กไฟฟ้า
2️⃣ เมื่อผู้ใช้กดปุ่ม เริ่มต้น, ระบบจะปิดการทำงานของแม่เหล็กไฟฟ้า ลูกตุ้มจะเริ่มการแกว่ง
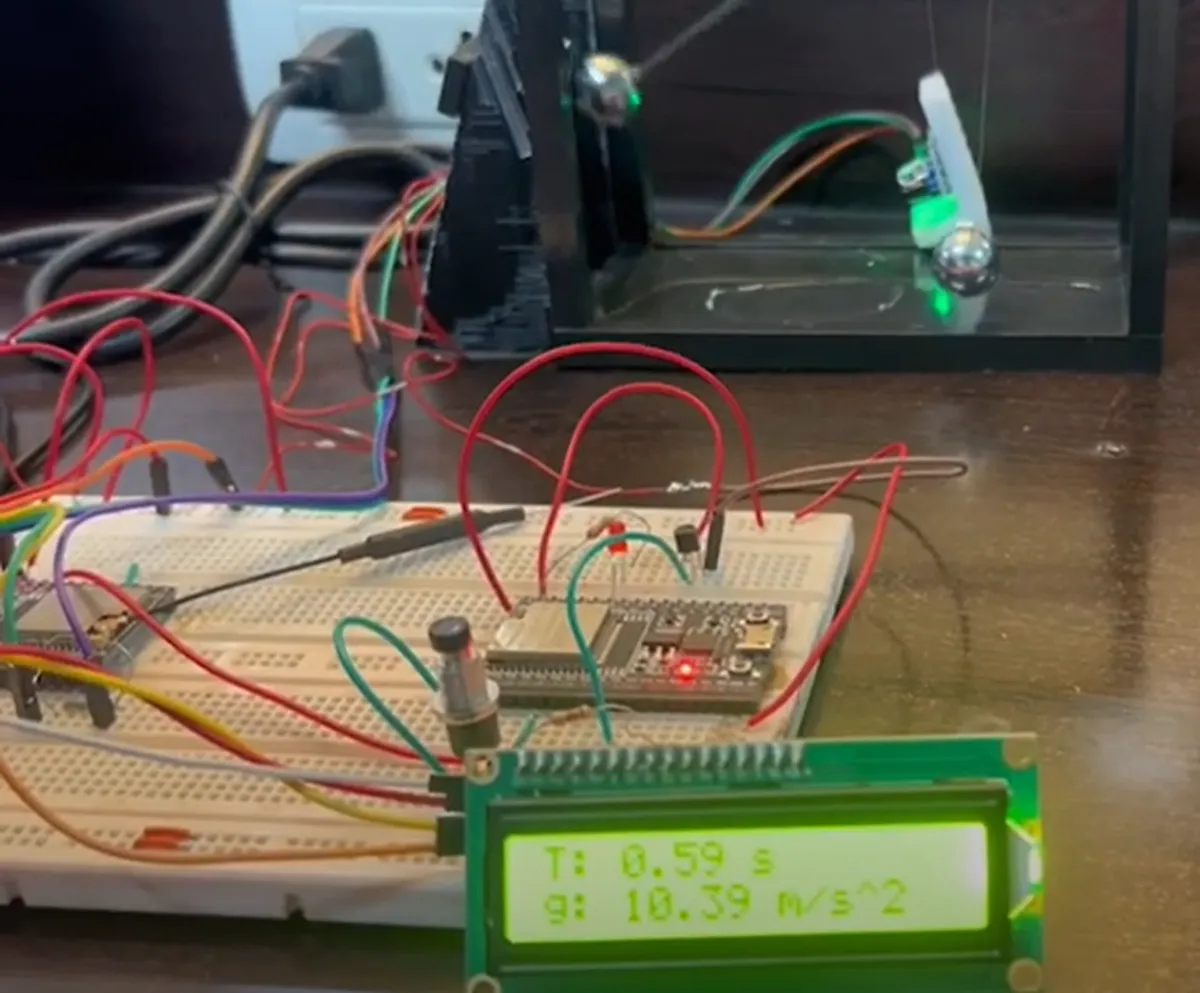
3️⃣ เซ็นเซอร์อินฟราเรด (IR) จะตรวจจับการแกว่งของลูกตุ้มเมื่อผ่านจุดตรวจจับ
4️⃣ ข้อมูลที่ได้จะถูกนำไปคำนวณคาบการแกว่งของลูกตุ้มและอัตราเร็วเชิงมุม
5️⃣ ระบบจะควบคุมการเปิด-ปิดแม่เหล็กไฟฟ้าเพื่อช่วยให้ลูกตุ้มแกว่งได้ต่อเนื่อง 🧲.
🧰 Materials & Components
| วัสดุ/อุปกรณ์ | จำนวน |
|---|---|
| เซ็นเซอร์อินฟราเรด (IR sensor) | 1 ตัว |
| บอร์ดไมโครคอนโทรลเลอร์ ESP32 | 2 ตัว |
| ตัวรับสัญญาณ Wi-Fi | 1 ตัว |
| ลูกตุ้ม | 2 ลูก |
| เส้นเอ็นสำหรับยึดลูกตุ้ม | - |
| กาว | - |
| เครื่องพิมพ์ 3 มิติ (3D printer) | - |
| ปุ่มกด (Push Button) | 1 ชิ้น |
| สายไฟ | - |
| ตัวต้านทาน (Resistor) และตัวเก็บประจุ (Capacitor) | - |
| หลอด LED | 1 หลอด |
| คอมพิวเตอร์สำหรับควบคุมและแสดงผล | - |
| แม่เหล็ก | 1 ตัว |
📐 Design Process
📌 Initial Design
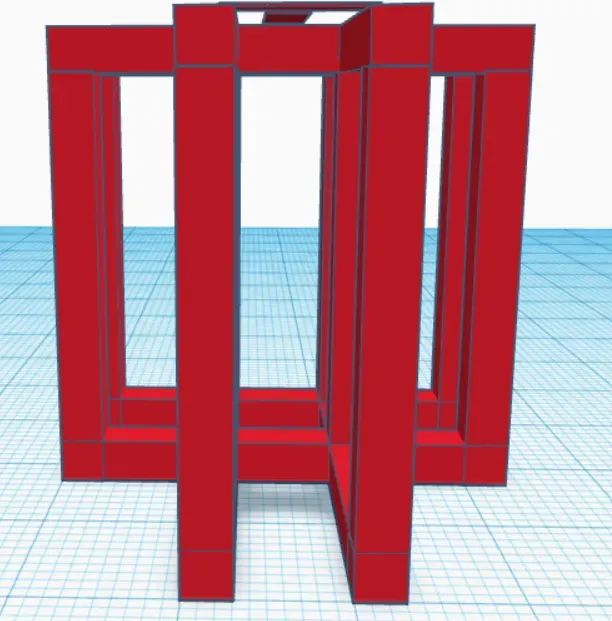
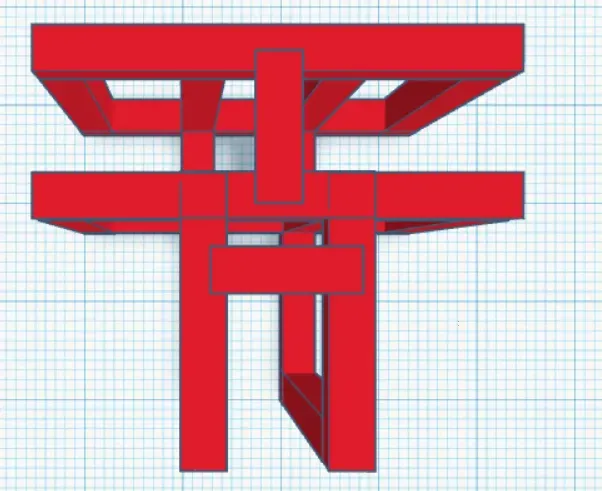
ในขั้นต้นได้ออกแบบโครงสร้างเป็นรูปตัว T โดยวางแผนให้ปล่อยลูกตุ้มตัวแรกก่อน แล้วทำการวัดคาบการแกว่งเพื่อใช้ในการคำนวณและปล่อยลูกตุ้มตัวที่สองในเวลาที่เหมาะสม เพื่อหลีกเลี่ยงการชนกัน 🕒.
Design แบบแรก
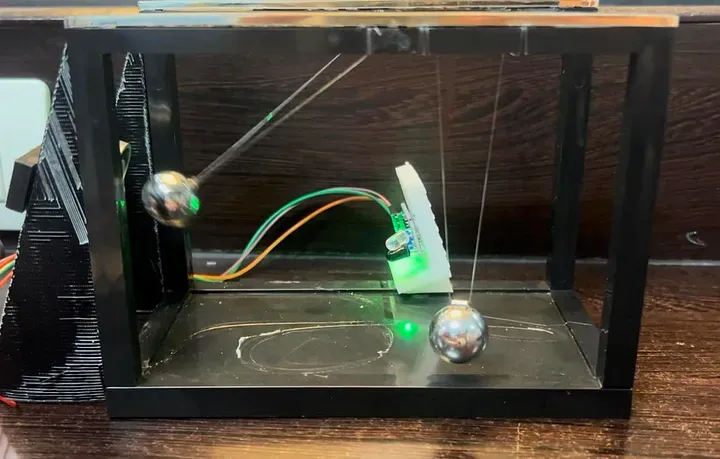
Design แบบที่ทำเสร็จแล้ว
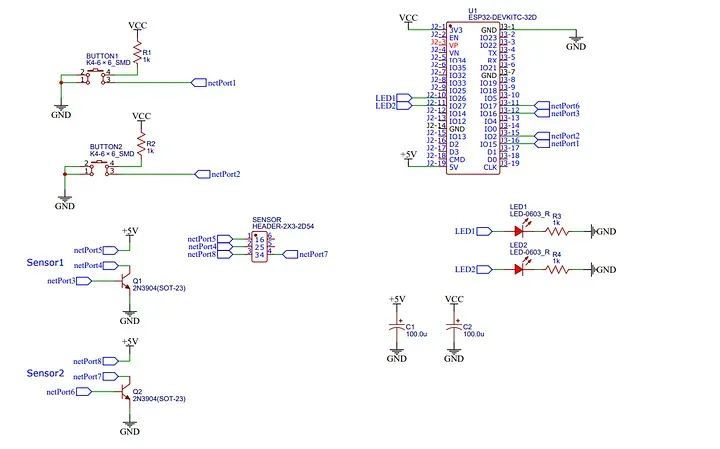
Code ที่ใช้
ESP32 ตัวที่ 1
#define BUTTON 34
#define SENSOR 23
#define MAGNETIC 27
float previousTimer = 0.000f;
float timer[2] = {0.000f};
int count = 0;
bool statusSensor = false;
bool firstTime = true;
bool buttonPressed = false;
char messageT[75];
bool check = false;
const char ssid[] = "ssid";
const char pass[] = "pass";
const char mqtt_broker[]="test.mosquitto.org";
const char mqtt_topic[]="####";
const char mqtt_client_id[]="####";
int MQTT_PORT=1883;
WiFiClient net;
MQTTClient client;
void connect() {
Serial.print("checking wifi...");
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
delay(1000);
}
Serial.print("\nconnecting...");
while (!client.connect(mqtt_client_id)) {
Serial.print(".");
delay(1000);
}
Serial.println("\nconnected!");
client.subscribe(mqtt_topic);
// client.unsubscribe("/hello");
}
void messageReceived(String &topic, String &payload) {
Serial.println("incoming: " + topic + " - " + payload);
if(payload == "pushButton"){
digitalWrite(MAGNETIC, HIGH);
delay(100);
digitalWrite(MAGNETIC, LOW);
}
}
void setup() {
// ปุ่มปล่อยแม่เหล็ก
pinMode(BUTTON, INPUT);
// sensor ตรวจจับ
pinMode(SENSOR, INPUT);
// แม่เหล็ก
pinMode(MAGNETIC, OUTPUT);
digitalWrite(MAGNETIC, LOW);
WiFi.begin(ssid, pass);
Serial.begin(9600);
client.begin(mqtt_broker, MQTT_PORT, net);
client.onMessage(messageReceived);
connect();
lcd.begin();
lcd.backlight();
lcd.print("Group2.11");
}
void loop() {
client.loop();
if (!client.connected()) {
connect();
}
// จับเวลาและหยุดจับเวลา
if(digitalRead(SENSOR) == 0 && !statusSensor){
if (firstTime) {
firstTime = false;
} else {
timer[count] = millis() - timer[count]; // หยุดจับเวลา
count++;
if (count == 2) {
count = 0;
// ตรวจสอบค่า timer
bool validData = true;
for (int i = 0; i < 2; i++) {
if (timer[i] < 200.000f) {
validData = false;
break;
}
}
if (validData) {
// คำนวณค่า timer เฉลี่ย
float averageTimer = 0.000f;
for (int i = 0; i < 2; i++) {
averageTimer += timer[i];
}
averageTimer /= 2.000f;
// คำนวณค่า g เฉลี่ย
double g = 0.0;
double T = 0.0;
double W = 0.0;
for (int i = 0; i < 2; i++) {
g += 4 * PI * PI * (0.09 / ((timer[i] / 500.0) * (timer[i] / 500.0)));
}
g /= 2.0;
W = sqrt(g/0.09);
lcd.setCursor(0, 1);
// แสดงผลลัพธ์
if( g > 8.5){
lcd.clear();
lcd.print("T: ");
lcd.print(averageTimer/500.000);
lcd.print(" s");
lcd.setCursor(0, 2);
lcd.print("g: ");
lcd.print(g);
lcd.print(" m/s^2");
Serial.println();
Serial.print("T: ");
Serial.print(averageTimer/500.000);
Serial.println(" s");
Serial.print("g: ");
Serial.print(g);
Serial.println(" m/s^2");
Serial.print("w: ");
Serial.print(W);
Serial.println(" rad/s");
sprintf(messageT, "T: %.3f s __ g: %.2f m/s^2 __ w: %.2f rad/s", averageTimer/500.0 , g, W);
client.publish(mqtt_topic, messageT);
}
}
}
}
timer[count] = millis(); // เริ่มจับเวลา
statusSensor = true;
}
if(digitalRead(SENSOR) == 1 && statusSensor){
statusSensor = false;
}
}ESP32 ตัวที่ 2
#define MAGNETIC 27
#define BUTTON 34
#define LED 21
float previousTimer = 0.000f;
float timer[2] = {0.000f};
int count = 0;
bool statusSensor = false;
bool firstTime = true;
bool buttonPressed = false;
char messageT[50];
bool check = false;
void setup() {
pinMode(BUTTON, INPUT);
pinMode(MAGNETIC, OUTPUT);
digitalWrite(MAGNETIC, HIGH);
pinMode(LED, OUTPUT);
digitalWrite(LED,HIGH);
}
void loop() {
if (digitalRead(BUTTON) == HIGH && !buttonPressed) {
buttonPressed = true;
digitalWrite(MAGNETIC, LOW);
digitalWrite(LED,LOW);
while(buttonPressed){
delay(310);
digitalWrite(MAGNETIC, HIGH);
digitalWrite(LED,HIGH);
delay(300);
digitalWrite(MAGNETIC, LOW);
digitalWrite(LED, LOW);
}
}
if (digitalRead(BUTTON) == LOW && buttonPressed) {
buttonPressed = false;
digitalWrite(MAGNETIC, HIGH);
digitalWrite(LED,LOW);
}
}🎥 Demonstration Video
🛠️ Challenges Faced
- Challenge 1: การวางแผนในการใช้ลูกตุ้ม 2 ตัว แต่เนื่องจากข้อจำกัดด้านเวลา จึงได้ปรับเปลี่ยนเป็นการใช้เพียงแกนเดียวแทน 🎯.
- Challenge 2: แม่เหล็กที่ต้องการไฟขนาด 12V แต่บอร์ด ESP32 ให้ได้เพียง 5V ทำให้ต้องหาทางแก้ปัญหาโดยใช้แหล่งจ่ายไฟเพิ่มเติม 🔌.
- Challenge 3: การทำให้ลูกตุ้มแกว่งอย่างต่อเนื่องเกิดปัญหาจากแรงแม่เหล็กไม่เพียงพอ และแรงต้านอากาศไม่เอื้ออำนวย 🌀.
📘 Lessons Learned & Recommendations
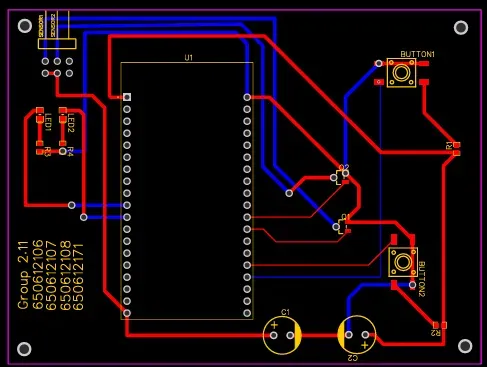
การออกแบบ PCB ที่ไม่เหมาะสมส่งผลให้การใช้งานไม่เต็มประสิทธิภาพ และการจัดการเวลาไม่ดีทำให้ไม่สามารถแก้ปัญหาทันเวลาได้ ดังนั้นควรมีการวางแผนและวิจัยมากขึ้นในอนาคตเพื่อให้การทดลองราบรื่นขึ้น 📅.
🙌 Project Contributors
- อภิวิชญ์ บุญฤทธิ์
- อัฎษฎา วิริยา
- อาทิตยา เที่ยงอารมย์
- เอื้ออาทร เอื้อวงศ์ตระกูล